毫升 | OPTICS 聚类说明
先决条件: DBSCAN 集群
OPTICS Clustering 代表Ordering Points To identify Cluster Structure 。它从 DBSCAN 聚类算法中汲取灵感。它为 DBSCAN 聚类的概念增加了两个术语。他们是:-
- 核心距离:将给定点分类为核心点所需的半径的最小值。如果给定点不是核心点,那么它的核心距离是未定义的。
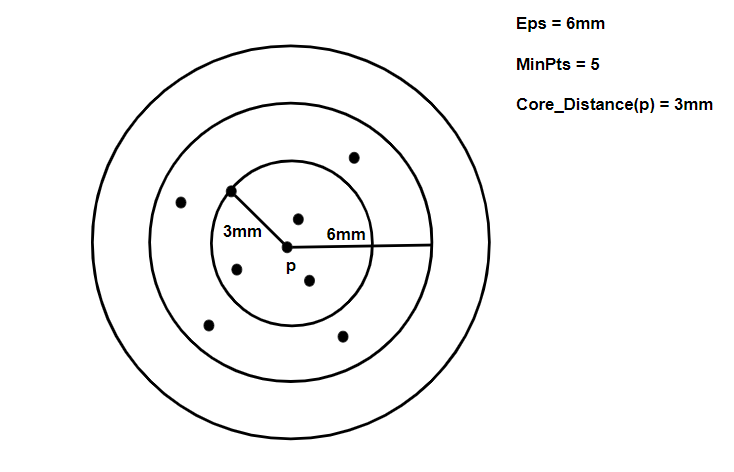
- 可达距离:它是相对于另一个数据点 q(Let) 定义的。点 p 和 q 之间的可达距离是 p 的核心距离和 p 和 q 之间的欧几里得距离(或其他一些距离度量)的最大值。请注意,如果 q 不是核心点,则不定义可达距离。

这种聚类技术不同于其他聚类技术,因为这种技术没有明确地将数据分割成簇。相反,它会生成可达距离的可视化,并使用此可视化对数据进行聚类。
伪代码:
以下伪代码已从算法的维基百科页面中引用。
OPTICS(DB, eps, MinPts)
#Repeating the process for all points in the database
for each point pt of DB
#Initializing the reachability distance of the selected point
pt.reachable_dist = UNDEFINED
for each unprocessed point pt of DB
#Getting the neighbours of the selected point
#according to the definitions of epsilon and
#minPts in DBSCAN
Nbrs = getNbrs(pt, eps)
mark pt as processed
output pt to the ordered list
#Checking if the selected point is not noise
if (core_dist(pt, eps, Minpts) != UNDEFINED)
#Initializing a priority queue to get the closest data point
#in terms of Reachability distance
Seeds = empty priority queue
#Calling the update function
update(Nbrs, pt, Seeds, eps, Minpts)
#Repeating the process for the next closest point
for each next q in Seeds
Nbrs' = getNbrs(q, eps)
mark q as processed
output q to the ordered list
if (core_dist(q, eps, Minpts) != UNDEFINED)
update(Nbrs', q, Seeds, eps, Minpts)
更新函数的伪代码如下:
update(Nbrs, pt, Seeds, eps, MinPts)
#Calculating the core distance for the given point
coredist = core_dist(pt, eps, MinPts)
#Updating the Reachability distance for each neighbour of p
for each obj in Nbrs
if (obj is not processed)
new_reach_distance = max(coredist, dist(pt, obj))
#Checking if the neighbour point is in seeds
if (obj.reachable_dist == UNDEFINED)
#Updation step
obj.reachabled_dist = new_reach_distance
Seeds.insert(obj, new_reach_distance)
else
if (new_reach_distance < obj.reachable_dist)
#Updation step
o.reachable_dist = new_reach_distance
Seeds.move-up(obj, new_reach_distance)
OPTICS 集群与 DBSCAN 集群:
- 内存成本: OPTICS 集群技术需要更多内存,因为它维护一个优先级队列(Min Heap)来确定下一个数据点,该数据点在可达距离方面最接近当前正在处理的点。它还需要更多的计算能力,因为最近邻查询比 DBSCAN 中的半径查询更复杂。
- 更少的参数: OPTICS 聚类技术不需要维护 epsilon 参数,仅在上面的伪代码中给出,以减少花费的时间。这导致参数调整的分析过程减少。
这种技术不会将给定的数据分成集群。它仅产生一个可达距离图,并根据程序员的解释对点进行相应的聚类。