📌 相关文章
- 雷达系统-雷达类型(1)
- 雷达系统-雷达类型
- 雷达系统-连续波雷达
- 雷达系统-连续波雷达(1)
- 阴谋在英语中的含义 (1)
- 雷达系统-跟踪雷达(1)
- 雷达系统-跟踪雷达
- 雷达系统-雷达天线(1)
- 雷达系统-雷达天线
- 阴谋在英语中的含义 - 无论代码示例
- 如何在 R 中创建雷达图?(1)
- 如何在 R 中创建雷达图?
- 雷达系统-雷达显示器(1)
- 雷达系统-雷达显示器
- 连续波雷达 (1)
- 使用极坐标方法定义圆(1)
- 使用极坐标方法定义圆
- 雷达系统-FMCW雷达
- 雷达系统-FMCW雷达(1)
- 雷达系统-MTI雷达
- 如何将 1- i 转换为极坐标形式?
- 在Python中使用 Plotly 的极坐标图
- 在Python中使用 Plotly 的极坐标图(1)
- 控制系统-极坐标图(1)
- 控制系统-极坐标图
- 连续波雷达 - 无论代码示例
- 极坐标到笛卡尔java(1)
- 复数的极坐标表示(1)
- 复数的极坐标表示
📜 阴谋-极坐标图和雷达图
📅 最后修改于: 2020-11-29 07:08:26 🧑 作者: Mango
在本章中,我们将学习如何借助Plotly制作极坐标图和雷达图。
首先,让我们研究极坐标图。
极坐标图
极坐标图是圆形图的常见变体。当可以最容易地根据半径和角度将数据点之间的关系可视化时,这很有用。
在极坐标图中,序列由连接极坐标系统中各点的闭合曲线表示。每个数据点由距极点的距离(径向坐标)和距固定方向的角度(角度坐标)确定。
极坐标图表示沿径向和角轴的数据。径向和角坐标由go.Scatterpolar()函数的r和theta参数给出。 Theta数据可以是分类的,但是数值数据也是可能的,并且是最常用的数据。
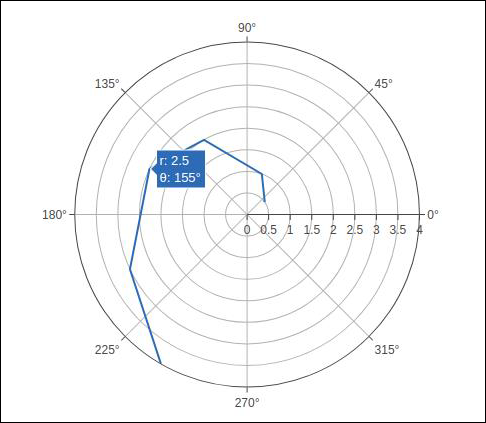
以下代码生成基本的极坐标图。除了r和theta参数外,我们还将模式设置为线(可以将其设置为标记,在这种情况下,仅显示数据点)。
import numpy as np
r1 = [0,6,12,18,24,30,36,42,48,54,60]
t1 = [1,0.995,0.978,0.951,0.914,0.866,0.809,0.743,0.669,0.588,0.5]
trace = go.Scatterpolar(
r = [0.5,1,2,2.5,3,4],
theta = [35,70,120,155,205,240],
mode = 'lines',
)
data = [trace]
fig = go.Figure(data = data)
iplot(fig)
输出如下-
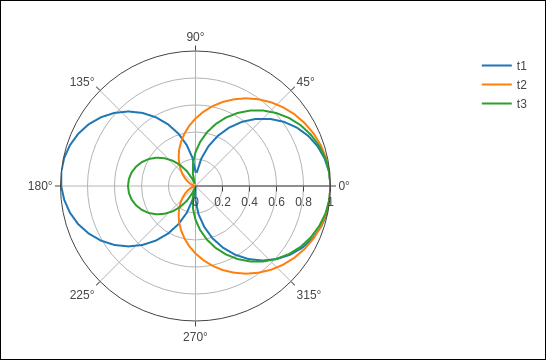
在以下示例中,使用逗号分隔值(CSV)文件中的数据来生成极坐标图。 polar.csv的前几行如下-
y,x1,x2,x3,x4,x5,
0,1,1,1,1,1,
6,0.995,0.997,0.996,0.998,0.997,
12,0.978,0.989,0.984,0.993,0.986,
18,0.951,0.976,0.963,0.985,0.969,
24,0.914,0.957,0.935,0.974,0.946,
30,0.866,0.933,0.9,0.96,0.916,
36,0.809,0.905,0.857,0.943,0.88,
42,0.743,0.872,0.807,0.923,0.838,
48,0.669,0.835,0.752,0.901,0.792,
54,0.588,0.794,0.691,0.876,0.74,
60,0.5,0.75,0.625,0.85,0.685,
在笔记本的输入单元格中输入以下脚本以生成极坐标图,如下所示:
import pandas as pd
df = pd.read_csv("polar.csv")
t1 = go.Scatterpolar(
r = df['x1'], theta = df['y'], mode = 'lines', name = 't1'
)
t2 = go.Scatterpolar(
r = df['x2'], theta = df['y'], mode = 'lines', name = 't2'
)
t3 = go.Scatterpolar(
r = df['x3'], theta = df['y'], mode = 'lines', name = 't3'
)
data = [t1,t2,t3]
fig = go.Figure(data = data)
iplot(fig)
下面给出的是上述代码的输出-
雷达图
雷达图(也称为蜘蛛图或星形图)以二维变量图的形式显示多变量数据,该二维变量表示在源自中心的轴上。轴的相对位置和角度通常是无用的。
对于雷达图,通常在go.Scatterpolar()函数中使用带有分类角度变量的极坐标图。
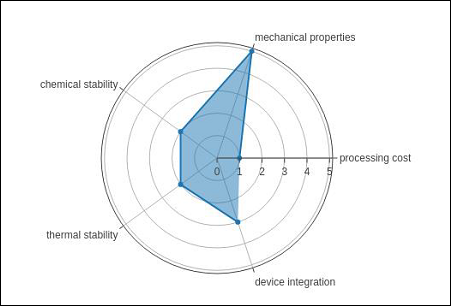
以下代码使用Scatterpolar()函数呈现基本雷达图-
radar = go.Scatterpolar(
r = [1, 5, 2, 2, 3],
theta = [
'processing cost',
'mechanical properties',
'chemical stability',
'thermal stability',
'device integration'
],
fill = 'toself'
)
data = [radar]
fig = go.Figure(data = data)
iplot(fig)
以下提到的输出是上述给定代码的结果-