- 雷达系统-雷达类型
- 雷达系统-雷达类型(1)
- 雷达系统-连续波雷达(1)
- 雷达系统-连续波雷达
- 雷达系统-跟踪雷达
- 雷达系统-跟踪雷达(1)
- 雷达系统-雷达天线
- 雷达系统-雷达天线(1)
- 雷达系统-雷达显示器
- 雷达系统-雷达显示器(1)
- 雷达系统教程(1)
- 雷达系统教程
- 雷达系统-MTI雷达
- 讨论雷达系统
- 讨论雷达系统(1)
- 雷达系统-概述(1)
- 雷达系统-概述
- 如何在 R 中创建雷达图?
- 如何在 R 中创建雷达图?(1)
- 连续波雷达 (1)
- 雷达系统-有用的资源(1)
- 雷达系统-有用的资源
- 连续波雷达 - 无论代码示例
- 雷达系统-距离方程
- 雷达系统-距离方程(1)
- 雷达系统-天线参数
- 雷达系统-天线参数(1)
- Excel图表-雷达图
- Excel图表-雷达图(1)
📅 最后修改于: 2020-11-23 05:01:58 🧑 作者: Mango
如果CW多普勒雷达使用调频,则该雷达称为FMCW多普勒雷达或简称为FMCW Radar 。也称为连续波调频雷达或CWFM雷达。它不仅可以测量目标的速度,还可以测量目标距雷达的距离。
FMCW雷达框图
FMCW雷达主要用作雷达高度计,以便在飞机降落时测量准确的高度。下图显示了FMCW雷达的框图–
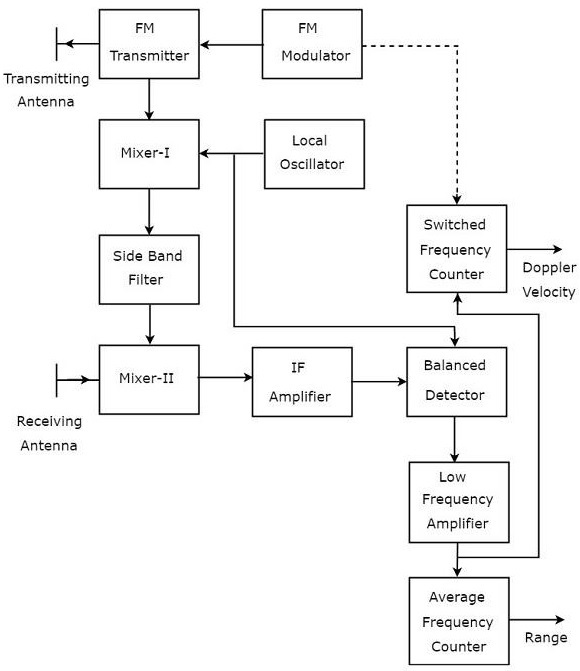
FMCW雷达包含两个天线-发射天线和接收天线,如图所示。发射天线发射信号,接收天线接收回波信号。
FMCW雷达的框图看上去与CW雷达的框图相似。除了CW Radar框图中存在的块外,它还包含一些修改后的块和一些其他块。 FMCW雷达各模块的函数如下所述。
-
FM调制器−产生具有可变频率$ f_o \ left(t \ right)$的调频(FM)信号,并将其应用于FM发射器。
-
FM发射器-它借助发射天线来发射FM信号。 FM发射器的输出也连接到Mixer-I。
-
本地振荡器-通常,本地振荡器用于产生RF信号。但是,这里它用于产生具有中频$ f_ {IF} $的信号。本地振荡器的输出连接到Mixer-I和Balanced Detector。
-
混频器-混频器可以产生应用于其的频率之和和差。将频率为$ f_o \ left(t \ right)$和$ f_ {IF} $的信号施加到Mixer-I。因此,混频器-I将产生频率为$ f_o \ left(t \ right)+ f_ {IF} $或$ f_o \ left(t \ right)-f_ {IF} $的输出。
-
边带滤波器-它仅允许一个边带频率,即上边带频率或下边带频率。图中所示的边带滤波器仅产生较低的边带频率。即$ f_o \ left(t \ right)-f_ {IF} $。
-
混频器II-混频器可以产生施加于其上的频率的和和差。将频率为$ f_o \ left(t \ right)-f_ {IF} $和$ f_o \ left(tT \ right)$的信号应用于混频器II。因此,Mixer-II将产生具有$ f_o \ left(tT \ right)+ f_o \ left(t \ right)-f_ {IF} $或$ f_o \ left(tT \ right)-f_o \左(t \ right)+ f_ {IF} $。
-
IF放大器-IF放大器放大中频(IF)信号。图中所示的IF放大器放大频率为$ f_o \ left(tT \ right)-f_o \ left(t \ right)+ f_ {IF} $的信号。该放大的信号被用作平衡检测器的输入。
-
平衡检测器-用于从施加的两个输入信号中产生频率为$ f_o \ left(tT \ right)-f_o \ left(t \ right)$的输出信号,这些输入信号的频率为$ f_o \ left( tT \ right)-f_o \ left(t \ right)+ f_ {IF} $和$ f_ {IF} $。平衡检测器的输出被用作低频放大器的输入。
-
低频放大器-将平衡检测器的输出放大到所需水平。低频放大器的输出同时应用于开关频率计数器和平均频率计数器。
-
开关频率计数器-对于获取多普勒速度的值很有用。
-
平均频率计数器-这对于获取Range的值很有用。