- 模拟通信-FM调制器
- 模拟通信-DSBSC调制器
- 模拟通信-SSBSC调制器
- 模拟通信-SSBSC调制器(1)
- 模拟通信-DSBSC调制器(1)
- 模拟通信-AM解调器(1)
- 模拟通信-AM解调器
- 模拟通信教程(1)
- 模拟通信教程
- 模拟通信-简介(1)
- 模拟通信-简介
- 讨论模拟通信(1)
- 讨论模拟通信
- AM (1)
- 模拟通信-传感器
- 模拟通信-传感器(1)
- 模拟通信-有用的资源
- 模拟通信-采样(1)
- 模拟通信-采样
- 模拟通信-调制
- 模拟通信-噪声(1)
- 模拟通信-噪声
- AM - 任何代码示例
- 模拟通信-接收器
- 模拟通信-接收器(1)
- 模拟通信-复用
- 模拟通信-复用(1)
- 模拟通信与数字通信的区别(1)
- 模拟通信与数字通信的区别
📅 最后修改于: 2020-11-26 09:50:14 🧑 作者: Mango
在本章中,让我们讨论产生调幅波的调制器。以下两个调制器会产生AM波。
- 平方律调制器
- 开关调制器
平方律调制器
以下是平方律调制器的框图
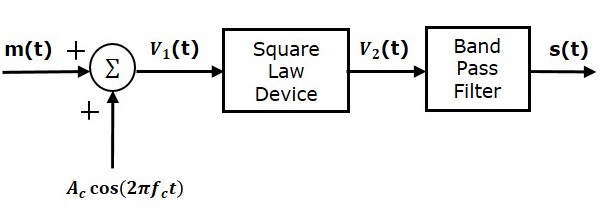
让调制信号和载波信号分别表示为$ m \ left(t \ right)$和$ A \ cos \ left(2 \ pi f_ct \ right)$。这两个信号被用作求和器(加法器)的输入。该求和块产生输出,该输出是调制信号和载波信号的和。数学上,我们可以写成
$$ V_1t = m \ left(t \ right)+ A_c \ cos \ left(2 \ pi f_ct \ right)$$
该信号$ V_1t $被用作诸如二极管的非线性器件的输入。二极管的特性与平方律密切相关。
$ V_2t = k_1V_1 \ left(t \ right)+ k_2V_1 ^ 2 \ left(t \ right)$ (等式1)
其中,$ k_1 $和$ k_2 $是常数。
用公式1代替$ V_1 \ left(t \ right)$
$$ V_2 \ left(t \ right)= k_1 \ left [m \ left(t \ right)+ A_c \ cos \ left(2 \ pi f_ct \ right)\ right] + k_2 \ left [m \ left(t \ right)+ A_c \ cos \ left(2 \ pi f_ct \ right)\ right] ^ 2 $$
$ \ Rightarrow V_2 \ left(t \ right)= k_1 m \ left(t \ right)+ k_1 A_c \ cos \ left(2 \ pi f_ct \ right)+ k_2 m ^ 2 \ left(t \ right)+ $
$ k_2A_c ^ 2 \ cos ^ 2 \ left(2 \ pi f_ct \ right)+ 2k_2m \ left(t \ right)A_c \ cos \ left(2 \ pi f_ct \ right)$
$ \ Rightarrow V_2 \ left(t \ right)= k_1 m \ left(t \ right)+ k_2 m ^ 2 \ left(t \ right)+ k_2 A ^ 2_c \ cos ^ 2 \ left(2 \ pi f_ct \右)+ $
$ k_1A_c \ left [1+ \ left(\ frac {2k_2} {k_1} \ right)m \ left(t \ right)\ right] \ cos \ left(2 \ pi f_ct \ right)$
上式的最后一项表示所需的AM波,上式的前三项是不需要的。因此,借助带通滤波器,我们只能使AM波通过并消除前三个项。
因此,平方律调制器的输出为
$$ s \ left(t \ right)= k_1A_c \ left [1+ \ left(\ frac {2k_2} {k_1} \ right)m \ left(t \ right)\ right] \ cos \ left(2 \ pi f_ct \ right)$$
AM波的标准方程为
$$ s \ left(t \ right)= A_c \ left [1 + k_am \ left(t \ right)\ right] \ cos \ left(2 \ pi f_ct \ right)$$
其中,$ K_a $是幅度灵敏度
通过将平方律调制器的输出与AM波的标准方程进行比较,我们将得到缩放因子$ k_1 $和幅度灵敏度$ k_a $ $ \ frac {2k_2} {k1} $。
开关调制器
以下是开关调制器的框图。
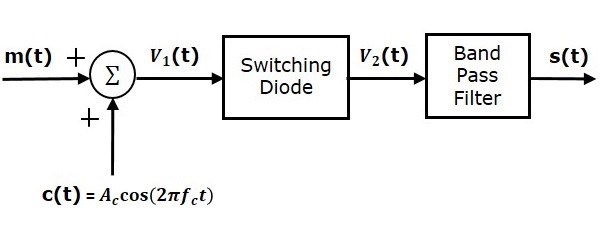
开关调制器类似于平方律调制器。唯一的区别是,在平方律调制器中,二极管以非线性模式工作,而在开关调制器中,二极管必须作为理想开关工作。
假设调制和载波信号分别表示为$ m \ left(t \ right)$和$ c \ left(t \ right)= A_c \ cos \ left(2 \ pi f_ct \ right)$。这两个信号被用作求和器(加法器)的输入。求和模块产生一个输出,该输出是调制信号和载波信号的和。数学上,我们可以写成
$$ V_1 \ left(t \ right)= m \ left(t \ right)+ c \ left(t \ right)= m \ left(t \ right)+ A_c \ cos \ left(2 \ pi f_ct \ right )$$
该信号$ V_1 \ left(t \ right)$被用作二极管的输入。假设与载波信号$ A_c $的幅度相比,调制信号的幅度很小。因此,二极管的导通和截止动作由载波信号$ c \ left(t \ right)$控制。这意味着,当$ c \ left(t \ right)> 0 $时,二极管将被正向偏置,而当$ c \ left(t \ right)<0 $时,二极管将被反向偏置。
因此,二极管的输出为
$$ V_2 \ left(t \ right)= \ left \ {\ begin {matrix} V_1 \ left(t \ right)&如果&c \ left(t \ right)> 0 \\ 0&if&c \ left(t \ right)<0 \ end {matrix} \ right。$$
我们可以近似为
$ V_2 \ left(t \ right)= V_1 \ left(t \ right)x \ left(t \ right)$ (等式2)
其中,$ x \ left(t \ right)$是周期为$ T = \ frac {1} {f_c} $的周期脉冲序列

此周期脉冲序列的傅里叶级数表示为
$$ x \ left(t \ right)= \ frac {1} {2} + \ frac {2} {\ pi} \ sum_ {n = 1} ^ {\ infty} \ frac {\ left(-1 \ right)^ n-1} {2n-1} \ cos \ left(2 \ pi \ left(2n-1 \ right)f_ct \ right)$$
$$ \ Rightarrow x \ left(t \ right)= \ frac {1} {2} + \ frac {2} {\ pi} \ cos \ left(2 \ pi f_ct \ right)-\ frac {2} { 3 \ pi} \ cos \ left(6 \ pi f_ct \ right)+ …. $$
代入公式2中的$ V_1 \ left(t \ right)$和$ x \ left(t \ right)$值。
$ V_2 \ left(t \ right)= \ left [m \ left(t \ right)+ A_c \ cos \ left(2 \ pi f_ct \ right)\ right] \ left [\ frac {1} {2} + \ frac {2} {\ pi} \ cos \ left(2 \ pi f_ct \ right)-\ frac {2} {3 \ pi} \ cos \ left(6 \ pi f_ct \ right)+ .. \ right] $
$ V_2 \ left(t \ right)= \ frac {m \ left(t \ right)} {2} + \ frac {A_c} {2} \ cos \ left(2 \ pi f_ct \ right)+ \ frac { 2m \ left(t \ right)} {\ pi} \ cos \ left(2 \ pi f_ct \ right)+ \ frac {2A_c} {\ pi} \ cos ^ 2 \ left(2 \ pi f_ct \ right)- $
$ \ frac {2m \ left(t \ right)} {3 \ pi} \ cos \ left(6 \ pi f_ct \ right)-\ frac {2A_c} {3 \ pi} \ cos \ left(2 \ pi f_ct \ right)\ cos \ left(6 \ pi f_ct \ right)+ ….. $
$ V_2 \ left(t \ right)= \ frac {A_c} {2} \ left(1+ \ left(\ frac {4} {\ pi A_c} \ right)m \ left(t \ right)\ right) \ cos \ left(2 \ pi f_ct \ right)+ \ frac {m \ left(t \ right)} {2} + \ frac {2A_c} {\ pi} \ cos ^ 2 \ left(2 \ pi f_ct \右)-$
$ \ frac {2m \ left(t \ right)} {3 \ pi} \ cos \ left(6 \ pi f_ct \ right)-\ frac {2A_c} {3 \ pi} \ cos \ left(2 \ pi f_ct \ right)\ cos \ left(6 \ pi f_ct \ right)+ … $
上述公式的第1项表示所期望的AM波和剩余的术语是不希望的条款。因此,借助带通滤波器,我们只能使AM波通过并消除其余项。
因此,开关调制器的输出为
$$ s \ left(t \ right)= \ frac {A_c} {2} \ left(1+ \ left(\ frac {4} {\ pi A_c} \ right)m \ left(t \ right)\ right )\ cos \ left(2 \ pi f_ct \ right)$$
我们知道AM波的标准方程是
$$ s \ left(t \ right)= A_c \ left [1 + k_am \ left(t \ right)\ right] \ cos \ left(2 \ pi f_ct \ right)$$
其中,$ k_a $是幅度灵敏度。
通过将开关调制器的输出与AM波的标准方程进行比较,我们将得到缩放因子为0.5,幅度灵敏度$ k_a $为$ \ frac {4} {\ pi A_c} $。